Robotiikka-asiaa
Robottien rakennusohjeita
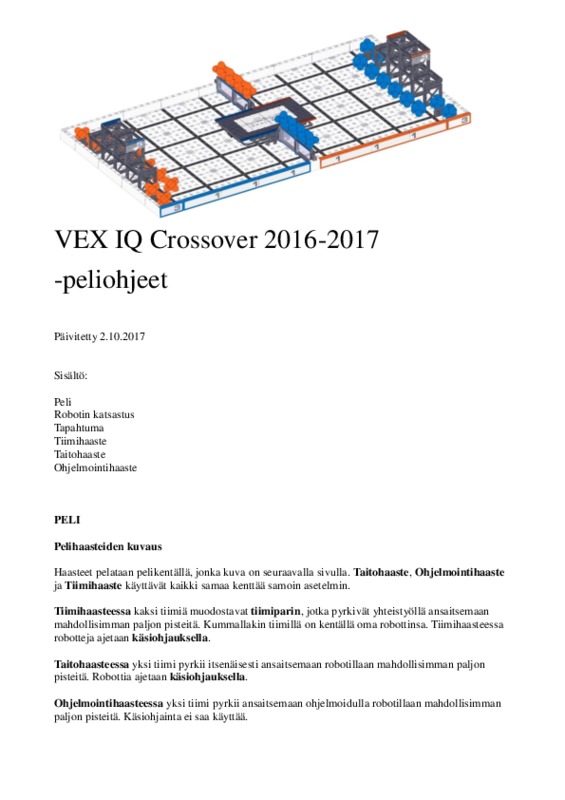
VEX IQ -robotiikka
Täältä voi opiskella graafista ohjelmointia. Ohjeet ovat englanniksi, mutta ne ovat selkeitä. Lisänä on kuvia ja videoita.
http://www.education.rec.ri.cmu.edu/previews/robot_c_products/teaching_rc_vex_iq/
Vinkkejä:
*Liikkeet:
-forward=eteenpäin
-backward=taaksepäin
-movemotor = -nosto ja kauhan avaamis - tai sulkeutumisliike
- turnleft = käännös vasempaan
- turnright = käännös oikeaan
*Liikkumistavat:
-degrees=asteet
-rotations = pyörähdykset
- milliseconds = millisekunnit
- seconds = sekunnit
- minutes = minuutit
*moottorit
-motor 1 = vasen moottori
-motor 6 = oikea moottori
- motor 10= käsimoottori
-motor 11= kauhamoottori
* Timing
- wait= odottaa
Ohjelmointihaasteita:
Eteenpäin ja taaksepäin
1. Ohjelmoi robottisi kulkemaan eteenpäin "Forward" tasan 50 cm. Merkitse lähtöviiva ja maaliviiva.
http://www.education.rec.ri.cmu.edu/previews/robot_c_products/teaching_rc_vex_iq/
2. Liiku eteen ja taakse ("Backward") 80 cm. Taaksepäin kuljettaessa matkan eteen pitää merkitä - (miinusmerkki).
3. Liiku eteen ja taakse 60 cm. Käytä eteenpäin mentäessä "Rotation" ja taaksepäin mentäessä "Degrees".
4. Kulje eteenpäin 1 m. Käytä ajastusta ja muuta kulkunopeus sopivaksi.
5. Liiku eteenpäin 70 cm, odota 5 sekuntia ja peruuta tasan 90 cm. Toista nämä 2 kertaa käyttämällä "Repeat" -komentoa.
Käännöksiä
6. Käänny tasan 90 astetta. Merkitse teipillä 90 asteen kulma lattiaan. Käytä ensin "Rotation" -yksikköä ja sitten "Degrees". Löydä tarkat luvut!
7. Käänny oikean kautta yksi kierros ympäri.
8. Kierrä tuoli ympäri! Käytä "Repeat" -toimintoa.
9. Liiku 70 cm eteenpäin, käänny ympäri ja palaa lähtöpaikalle.
10. Pujottelu: Laita 5 maitopurkkia 30 cm:n välein lattialle. Ohjelmoi robottisi pujottelemaan niiden välistä.
11. Ohjelmoi robottisi kulkemaan numeroita: laskekaa ikänne yhteen ja ohjelmoikaa robotti kulkemaan yhteenlaskun vastaus numeroina. Yhden numeron jälkeen robotin pitää pysähtyä 3 sekunnin verran.

Kauhan nostaminen ja avaaminen
12. Nosta kauhaa ylöspäin lattiasta tasan 20 cm.
13. Avaa kauha ja sulje se.
14. Nosta raejuustopurkki (iso) ilmaan ja liiku 50 cm eteenpäin. Laske raejuustopurkki maahan.
15. Tee tasapainolauta. Aseta robotti 50 cm:n päähän laudasta. Ohjelmoi robotti tasapainolaudalle siten, että lauta jää vaaka-asentoon tasapainoon. Kauhaa kannattaa nostaa, ettei se ole tiellä noustessa laudalle.
VEX IQ -robotiikka
Täältä voi opiskella graafista ohjelmointia. Ohjeet ovat englanniksi, mutta ne ovat selkeitä. Lisänä on kuvia ja videoita.
http://www.education.rec.ri.cmu.edu/previews/robot_c_products/teaching_rc_vex_iq/
http://www.education.rec.ri.cmu.edu/previews/robot_c_products/teaching_rc_vex_iq/