Arduino ohjelmointi
Sos arduino
#include <Arduino.h>
#include <Wire.h>
#include <SoftwareSerial.h>
double angle_rad = PI/180.0;
double angle_deg = 180.0/PI;
void setup(){
pinMode(A0+0,INPUT);
pinMode(9,OUTPUT);
}
void loop(){
if((1000) < (analogRead(A0+0))){
for(int __i__=0;__i__<3;++__i__)
{
digitalWrite(9,1);
_delay(0.2);
digitalWrite(9,0);
_delay(0.2);
}
for(int __i__=0;__i__<3;++__i__)
{
digitalWrite(9,1);
_delay(0.7);
digitalWrite(9,0);
_delay(0.2);
}
for(int __i__=0;__i__<3;++__i__)
{
digitalWrite(9,1);
_delay(0.2);
digitalWrite(9,0);
_delay(0.2);
}
_delay(1);
}
_delay(1);
_loop();
}
void _delay(float seconds){
long endTime = millis() + seconds * 1000;
while(millis() < endTime)_loop();
}
void _loop(){
}
|
Video Arduino
Liitteet:

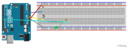
Mallikytkennät

.PNG")


0 kommenttia